As a result of the sheer amount of time all of us were putting into the project itself, as well as making sure that all of us were simultaneously staying on track to graduate, updating the blog has become a back-burner priority. And instead of acting like these updates have been coming all the time, from here on out the posts will simply be back-logged a little and a condesnsed discussion of the different challenges and solutions we generated.
So without further ado, this is the progress we made at the end of the winter quarter:
We made our way around a number of hobby, and reused electronics stores. We were in search of motors and linear actuators to test our mechanical motion design. Unfortunately, everything was found to either be closed or out of business. Upon arriving back in Santa Cruz, we decided to bite the bullet and buy a motor on Amazon, and just wait for it to come in.
We began designing the most basic of control algorithms. It was naive and a relied on everything working perfectly. It will have to be redesigned.
We moved away from using a spring (Spring don't really care about deflection, only stretchng) and instead we repurposed elastic bands. This required a complete redesign of the top part of the hand.
We realized that the ring on the finger tip was sliding around too much when the finger was moving. It was redesigned to incorporate more of a "thimble" like design. This kept the piece mounted and the sensor protected.
A wrist splint was bought to lock the wrist in position. Our motor proved to be slightly over torqued; It would bend the wrist if the motor was on for too long. Cable routing, used to protect break cables on bikes, was repurposed to protect the wrist gaurd from the steel cable we decided to use.
A spool was designed to wrap cable onto it, and actually curl the finger.
Flex sensors were incorportated a indivators of full curl, relaxation, or obstruction that cause the motor to stall.
We completed a very rough prototype of a single finger. It didn't work very well.
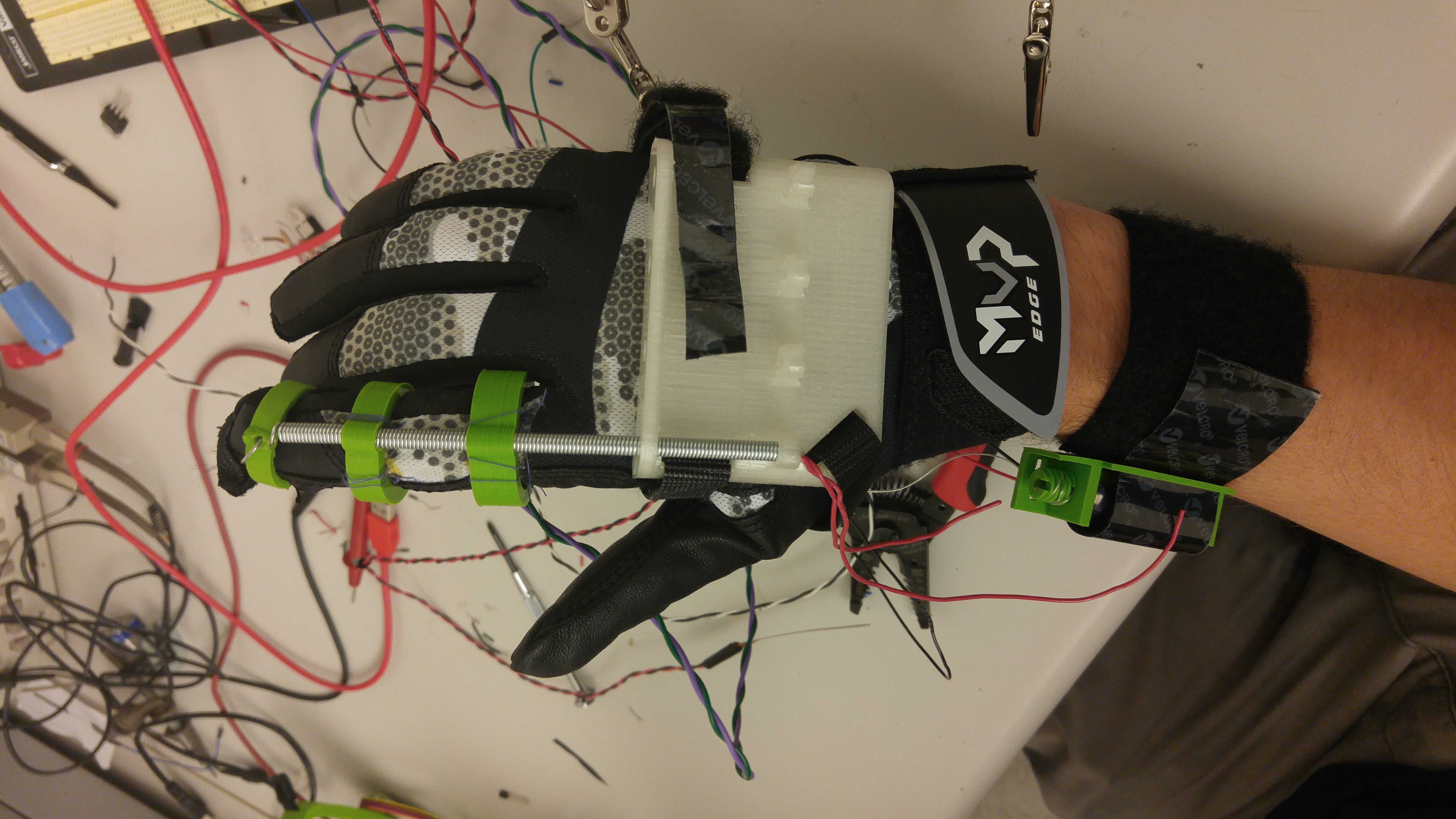
What we had around week 6.
What we finished the Quarter with.
Week 4
Continued Design and Prototyping
This week we installed and calibrated a new 3D printer in our lab space. The Ultimaker 2 is small table top printer that enables us to print PLA material prototypes. Building off of our design for foamcore, we estimated the needs we have for the PLA prototype.
We mocked up our designs in the SolidWorks and began printing. We had hiccups and we found limitations in our printing softare, but we now have 2 full PLA prototypes and are waiting for motors
Week 3
Discussions and Foam Core
Following up another week of little physical manifestation of progress, we decided to start cracking on a physical prototype. After analyzing some models we found in our readings and discussing the advantages and short-comings of each design we moved forward and quickly built a prototype. THe material used was quarter inch foam-core from which we fashioned 2 rings and a hand pad.
By running a thin wire from the Distal Phalanx (tip of the finger) down through the Proximal Phalanx (the bone that connects the finger to the palm), then through a pad that covered the palm, we were able to test the reaction on a relaxed finger that existed, when tugged on in this configuration. We found that this design was extremely successful as seen in the video:
Week 2
MAG is born!
Having moved into the new lab, we spent the remainder of the week setting up our work stations and filling out paper work to make sure everyone had access to the tools and equipment we needed.Following another short conversation with our mentors and advisors we began to do an analysis of finger models and diffrent existing methods of actuating finger motion. We drew some inspiration from the Open Hand Project as prosthetic limb movement tackles a similar subspace of mechanical actuation problems as we do.
We also came up with and framed our new logo! Introducing "MAGgy"!
Week 1
Moving in, Getting started.
This week was our first back on campus. We met with our adivsors and spoke briefly on the direction that we want to see the project progress in. We acknowledge that we still have an extensive amount of research to accomplish before we really begin to grasp the problem at hand.
We spent most of the week look for documentation and academic research papers on topics pertaining to this project. It we agreed that this was to become an affordable everyday use system, not a reabilitative exercise machine, we also overviewed the demands this put on our system requirements.